The HKT22 series are high performance two channel optical incremental housed encoders. These encoders emphasize high reliability, high resolution, and easy assembly. The HKT22 housed encoders use reflective technology to sense rotary position. The sensor consists of a LED source and a phototdetector IC in a single SO-8 surface mount package. The outputs of the HKT22 encoders are two square waves in quardrature. These encoders may be quickly and easily mounted to a motor.
Features:
Two channel quadrature output, quick and easy assembly, cost-effective, ideal for small motor systems, -10 C to 85 C operating temperature.
Applications:
The HKT22 series provide motion detection at a low cost, making them ideal for high volume applications. Typical applications include vending machines and motor manufacturing.
Output Waveform
90 Output phase difference, CW rotation
(CW rotation as seen from fit surface)
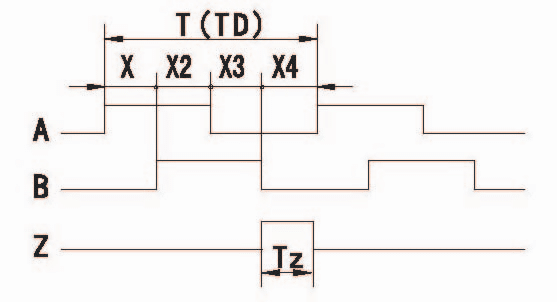
Square-wave accuracy: X1 + X2 = 1/2T 1/12T, X3 + X4 = 1/2T 1/12T
Pitch error of period: 0.01T
Pitch error of phase position: 1/18T
Z Phase: Tz=1/4T (1T,1/2T,1/4T…)
Period of pulses: T=360 /N (N: output pulses)
Signal accuracy: Xn=1/4T 1/12T (n=1,2,3,4)
A leads B clockwise when viewing the encoder shaft end.
The position of Z shaft against A,B phase is not specified.
Technical Specifications
| Electrical specifications | |
|---|---|
| Output wave | Square wave |
| Output signals | A,B, phase |
| Current consumption | 35mA |
| Output current | 2~12mA |
| Response frequency | 0~30KHz |
| Output phase difference | 90 45 |
| Supply voltage | 5V DC |
| Signal level | VH 85% Vcc, VL 0.3V |
| Number of pulses | 100,120,200,250,256,360 (other number of pulse available on request) |
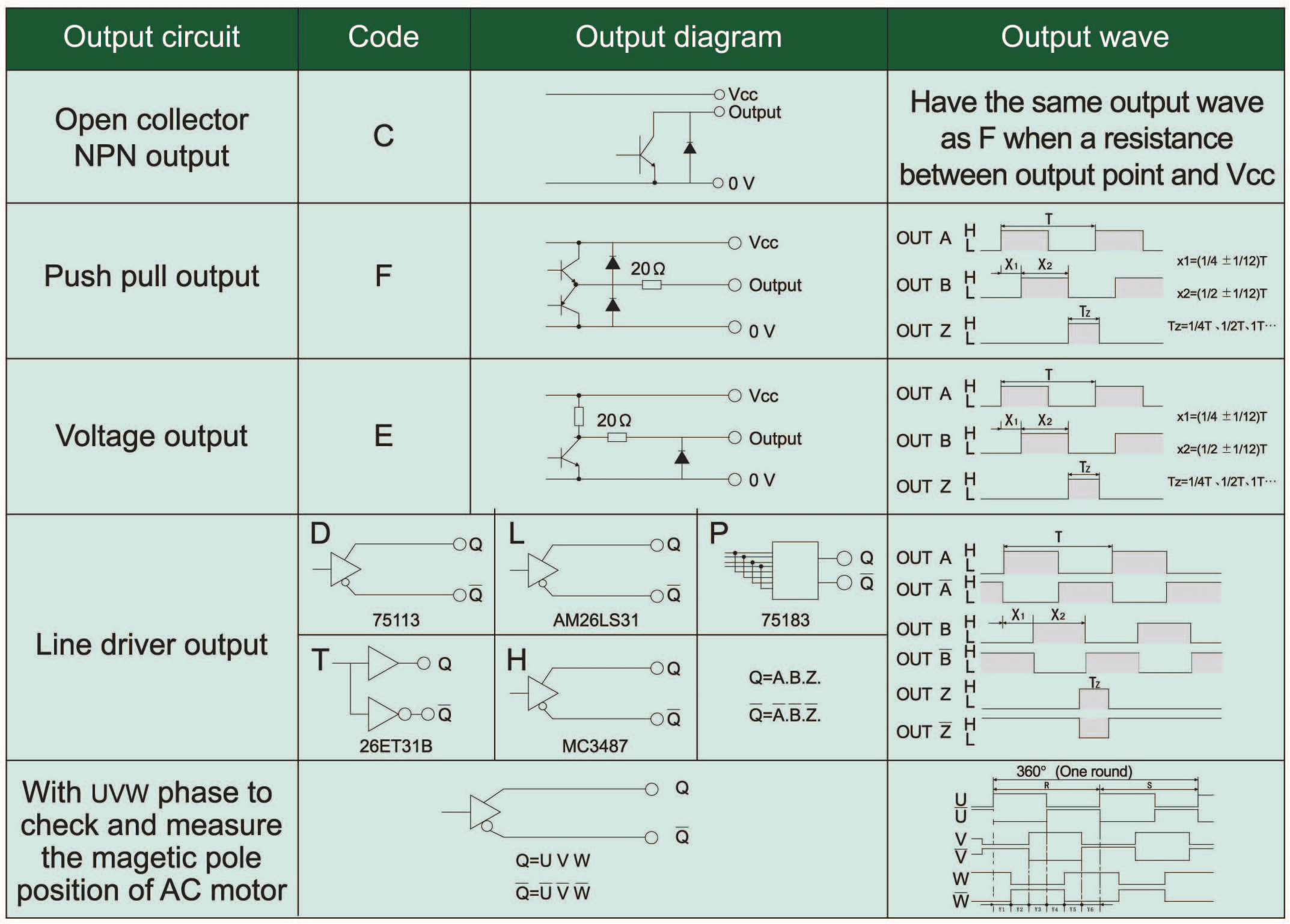
| Output circuit | Voltage |
| Mechanical Specifications | |
| Rotor inertiaof code-wheel | Appr. 4.0×10-8 Kgm2 |
| Hollow shaft diameter | 4mm (other diameter on request) |
| Shock resistance | 980m/s2, 6ms, 2 hours each on XYZ |
| Vibration proof | 50m/s2, 10~200Hz, 2 hours each on XYZ |
| Working life | MTBF 50000h (+25 C, 2000rpm) |
| Weight | Appr. =10g (with 0.5 meter cable) |
| Environmental Specifications | |
| Working humidity | 30~85% (no condensation) |
| Storage temperature | -40 C~100 C |
| Working temperature | -10 C~85 C |
| Protection class | IP50 |
Terminal Assignment
| Cable code | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Voltage output | 0V | N.C | SIG B | Vcc | SIG A |
Ordering Code
| HKT22 | 04 | 002 | G | 256 | B | 5 | E |
|---|---|---|---|---|---|---|---|
| Series | Hollow shaft diameter | Sequence number | Connection | Number of pulese | Output signals | Supply voltage | Output circuit |
Dimensions
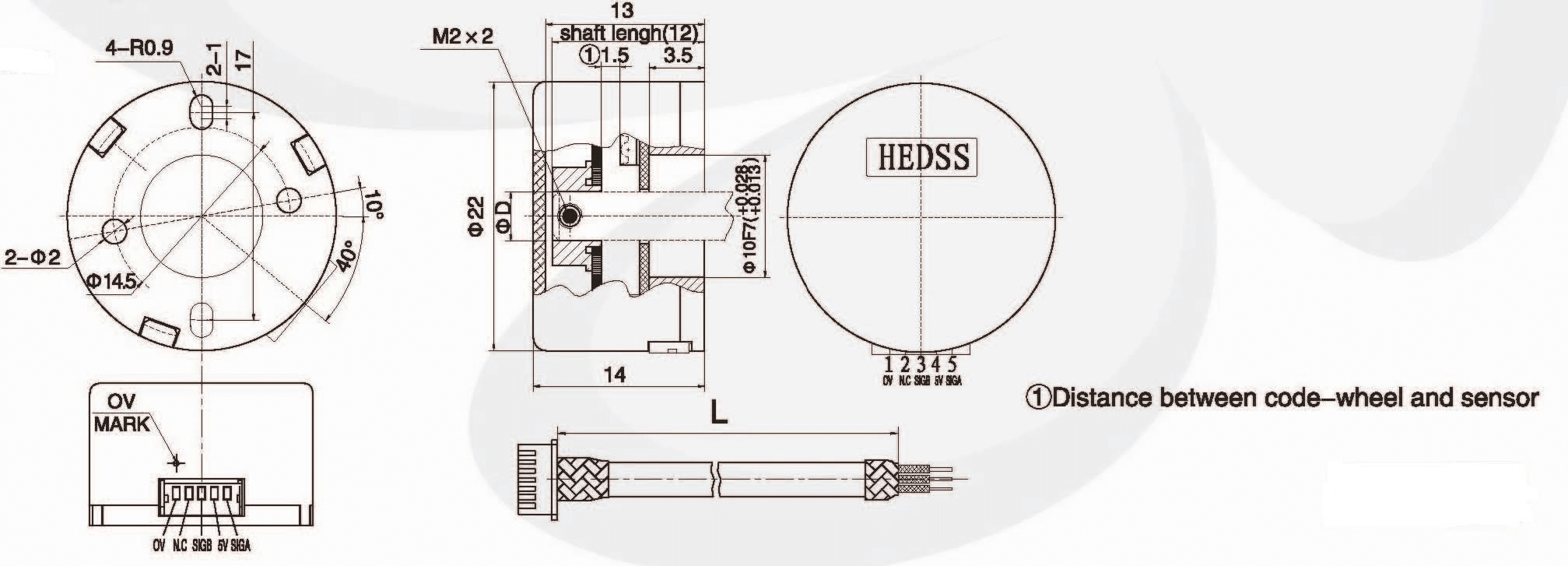
Motors described above are typical and can be customized upon request.