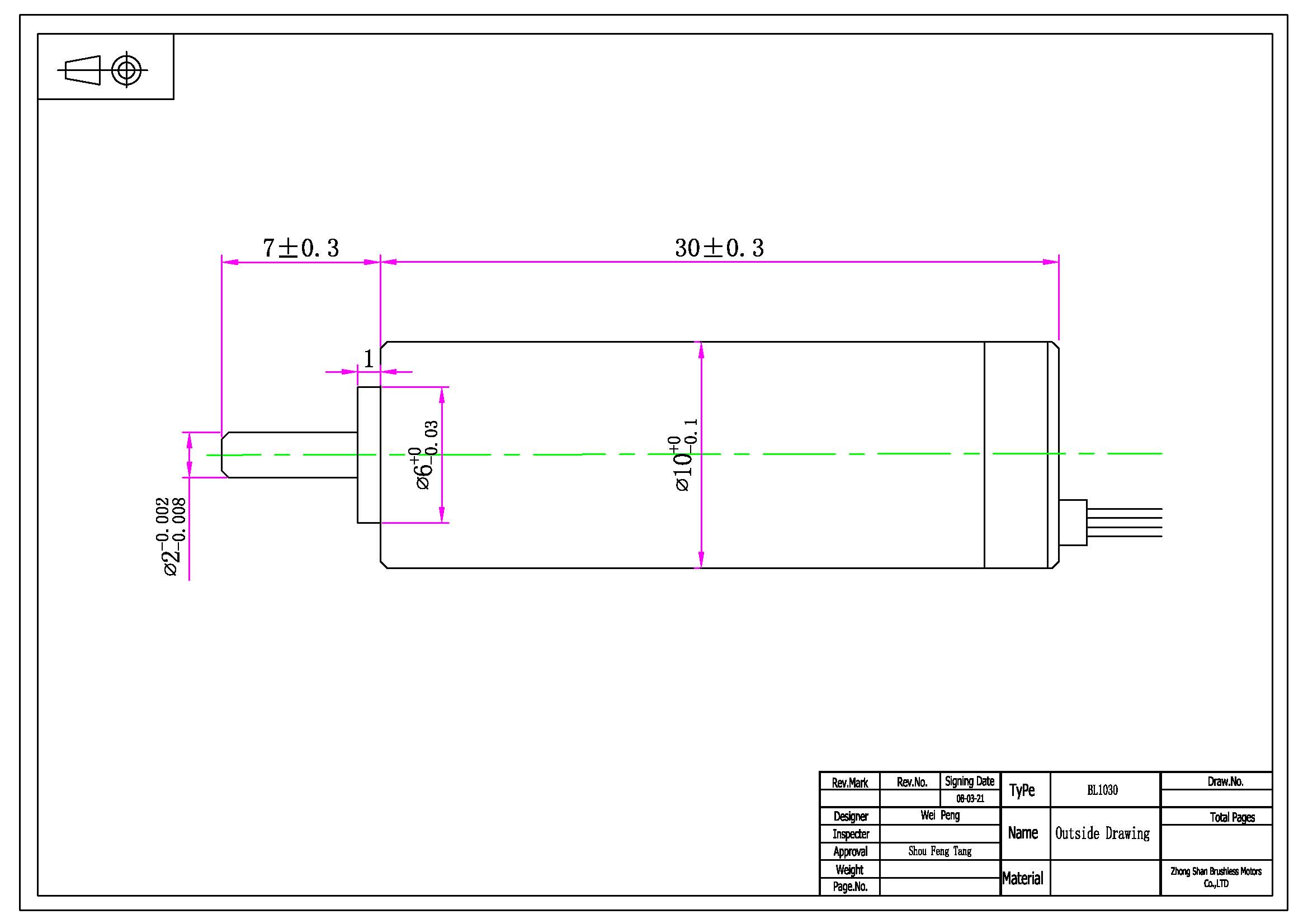
| Outline Drawing – Motor Only |
Specifications
|
||||||||
| Series No: BL1030 – – – P 2 | ||||||||
| No. |
Testing Item |
Tested Values |
Unit |
|||||
|
1 |
Nominal voltage |
UN |
9 |
|
|
|
|
V |
|
2 |
Terminal resistance, phase to phase |
R |
21 |
|
|
|
|
Ω |
|
3 |
Output power |
P2max |
0.71 |
|
|
|
|
W |
|
4 |
Efficiency |
ηmax |
39 |
|
|
|
|
% |
|
5 |
No-load speed |
no |
20200 |
|
|
|
|
rpm |
|
6 |
No-load current |
Io |
0.06 |
|
|
|
|
A |
|
7 |
Stall torque |
MH |
1.35 |
|
|
|
|
mNm |
|
8 |
Friction torque |
MF |
0.22 |
|
|
|
|
mNm |
|
9 |
Speed constant |
kn |
2609.82 |
|
|
|
|
rpm/V |
|
10 |
Back-EMF constant |
kE |
0.38 |
|
|
|
|
mV/rpm |
|
11 |
Torque constant |
kM |
3.66 |
|
|
|
|
mNm/A |
|
12 |
Current constant |
kI |
0.27 |
|
|
|
|
A/mNm |
|
13 |
Slope of n-M curve |
Δ n/ ΔM |
14978.51 |
|
|
|
|
rpm/mNm |
|
14 |
Mechanical time constant |
τ m |
4.71 |
|
|
|
|
ms |
|
15 |
Rotor inertia |
J |
0.03 |
|
|
|
|
gcm2 |
|
16 |
Angular acceleration |
αmax |
449.53 |
|
|
|
|
103rad/s2 |
|
17 |
Sensor |
|
Sensorless |
|
||||
|
18 |
Driver |
|
DR1802 |
|
||||
|
19 |
Weight |
|
15 |
g |
||||
|
20 |
Operating temperature range |
|
-30 ~+85 |
|||||
|
21 |
Commutation |
|
Electronically commutation |
|||||
|
22 |
Ball Bearing |
|
NMB & EZO |
|||||
|
23 |
Housing material |
|
Aluminum, black anodized |
|||||
|
24 |
Magnet material |
|
Sintered Nd-Fe-B |
|||||
|
25 |
Direction of rotation |
|
Electronically reversible |
|||||
|
The Operating Data For η max of Customer’s Specifications |
||||||||
|
26 |
Output Power |
P2opt |
0.69 |
|
|
|
|
W |
|
27 |
Efficiency |
ηopt |
39 |
|
|
|
|
% |
|
28 |
Speed |
nopt |
12050 |
|
|
|
|
rpm |
|
29 |
Load Current |
Iopt |
0.21 |
|
|
|
|
A |
|
30 |
Operating Torque |
Mopt |
0.54 |
|
|
|
|
mNm |
Note:
The I 0 is pure current of motor in this data sheet that means it not included the driver’s current.
Motors described above are typical and can be customized upon request.
